|
Young-Chae Son Welcome! I'm Young-Chae Son, a Ph.D. researcher at Dongguk University’s Interactive Robotics Lab, supervised by Prof. Soochul Lim. My research is centered on Physical AI, specifically focusing on building embodied foundation models that bridge high-level reasoning with low-level robotic control. I develop Vision-Language-Action (VLA) frameworks that integrate multimodal signals—such as visual, thermal, and physical interaction data—to enable robots to perform complex tasks in dynamic, real-world environments. Currently, I am investigating task-aware selective perception and autonomous planning to improve the efficiency and generalizability of robotic manipulation. This site contains my research projects, publications, and academic profile. |

|
ResearchI'm interested in computer vision, vision-language models, and robotic planning. Most of my research focuses on inferring physical awareness for robotic decision-making. |
|
Yoon-Ji Choi, Young-Chae Son, Soo-Chul Lim* under review A See Selectively, Act Adaptively decomposes bimanual robot manipulation into view-selective perception and interaction-aware action routing to improve robust, long-horizon task performance. |
|
Young-Chae Son, Jung-Woo Lee, Yoon-Ji Choi, Dae-Kwan Ko, Soo-Chul Lim* under review A dynamic information fusion framework that selectively processes only task-relevant camera views. |
|
|
Young-Chae Son, Dae-Kwan Ko, Yoon-Ji Choi, Soo-Chul Lim* IEEE Robotics and Automation Letters, 2026 Temperature-Aware Framework for Robotic Perception and Decision-Making |
|
|
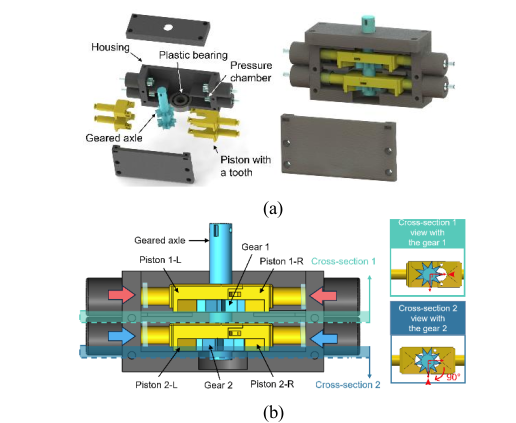
Young-Chae Son, Sung-Jung Joo, Po-Gyu Park, Changjin Yun, Soo-Chul Lim*, Hyung-Kew Lee* Conference on Precision Electromagnetic Measurements (CPEM), 2026 Development of a Nonmagnetic Pneumatic Stepper Motor for the Automatic Evaluation of Magnetic Field Uniformity in Helmholtz Coils. |
|
Young-Chae Son, DongHan Lee, Soo-Chul Lim* under review Robot task automation framework based on large language models (LLMs) that utilizes both visual and physical information. |
Experience & Activities |
|
Projects
|
Development of Intelligent Autonomous Manipulation Technology for Humanoids with Reduced Dependency on Real-World Data
Jul 2025 – Present
Robot Motion Generation AI based on Multimodal Vision/Tactile Information Driven by Language Model
Mar 2025 – Present
Collecting Large-scale Robot Manipulation Data in Physical Environment
Aug 2024 – Dec 2024
|
|
Patent
|
METHOD, APPARATUS, SYSTEM, AND COMPUTER-READABLE RECORDING MEDIUM FOR ROBOT CONTROL USING THERMAL IMAGE INFORMATION
Apr 2026
Korean Patent Application, No. 10-2026-0067117
|
|
Honors & Awards
|
Global Outstanding Talent Scholarship (Full Tuition Waiver for Ph.D.), Dongguk University
Sep 2025 – Present
Best Paper Award, BK21FOUR AIMS Center Winter Conference, Dongguk University
2026
Grand Prize (1st Place), Transfer Student Counseling Mentoring Testimonial, Tech University of Korea
2024
Grand Prize (1st Place), English Presentation Contest, Tech University of Korea
2024
|
|
Presentations
|
Presentation, "ThermoAct: Thermal-Aware Vision-Language-Action Models..."
Feb 2026
Locomotion and Manipulation Technology Research Group, KRoC, Pyeongchang
Presentation, "ThermoAct: Thermal-Aware Vision-Language-Action Models..."
Feb 2026
Robot Learning Research Group, KRoC, Pyeongchang
Poster, "High SNR and High Frame Rate Analog Front-End ICs..."
Jul 2022
Europe Korea Conference on Science and Technology (EKC), Marseille, France
|
|
Teaching
|
Teaching Assistant, Autonomous Robotics
Spring 2026
Teaching Assistant, Autonomous Robotics
Spring 2025
Teaching Assistant, Computational Mechanics
Fall 2024
Teaching Assistant, Autonomous Robotics
Spring 2024
Teaching Assistant, Fluid Mechanics
Fall 2023
|
|
|