Abstract
Framework
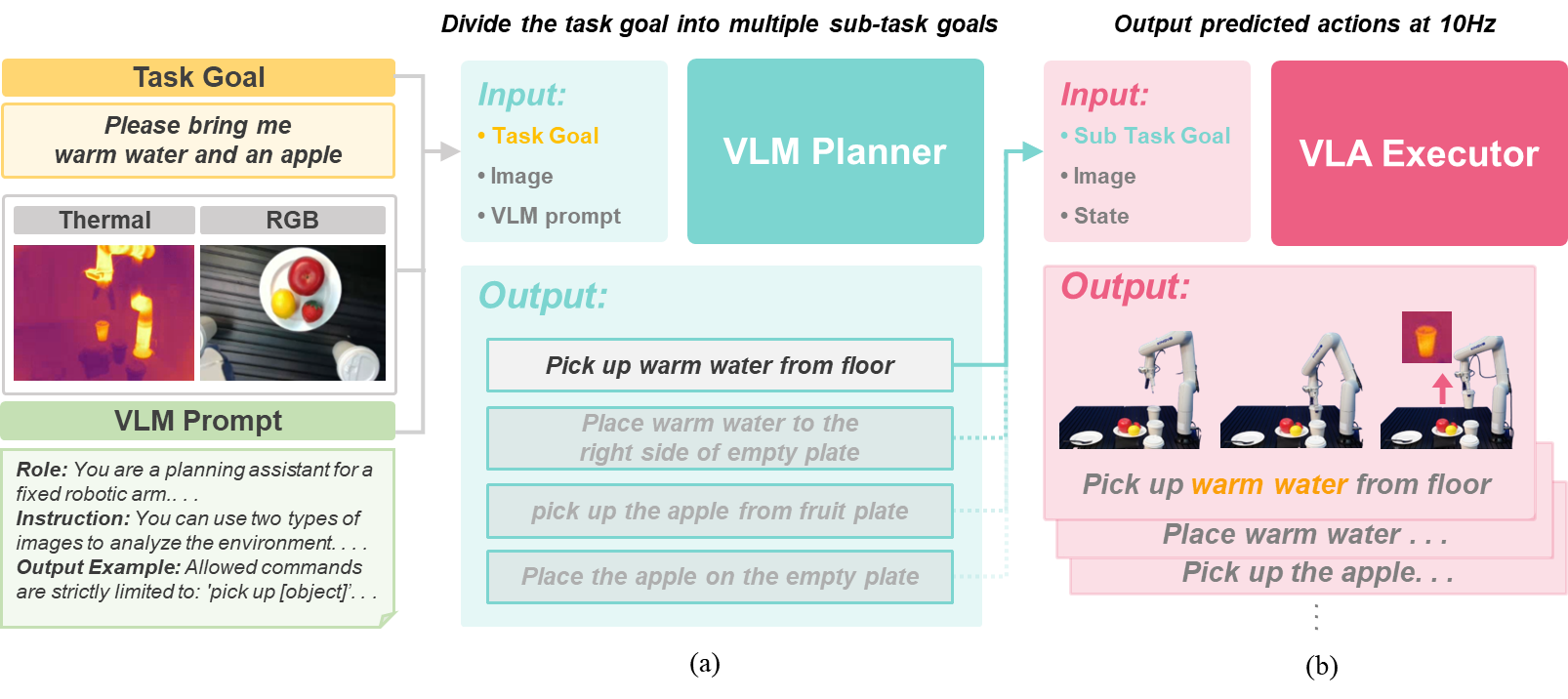
The ThermoAct framework proposed in this study consists of a Vision-Language Model (VLM) that performs reasoning and planning based on user commands and environmental information, and a Vision-Language-Action (VLA) module that executes robot control commands based on this plan. The VLM takes visual inputs, including thermal data, and a natural language instruction to generate a low-level action plan tailored to the situation. Subsequently, the VLA module controls the robot in real-time based on the decomposed plan and the corresponding inputs.
Experiment
All tasks were designed to require the successful completion of not only temperature-aware sub-tasks but also everyday sub-tasks (e.g., clearing unused cables, placing an apple on a plate). The sub-tasks decomposed by the VLM Planner follow a standardized format, aligning with protocols used in recent VLM-based robotic planning.
Task 1 to Task 3 were designed to evaluate whether the robot could act more intelligently by utilizing thermal information in daily scenarios, such as handing over a cup of warm water or giving a cold can of soda.
Task 4 and Task 5 was designed to verify the utility of thermal information in safety-related situations, such as picking up an overheated battery, turning off a hot hair straightener, and organizing the nearby power strip.

Figure 3: Task design and VLM planning protocol.