
Undergraduate Research Project(Master-Slave Robot arm)
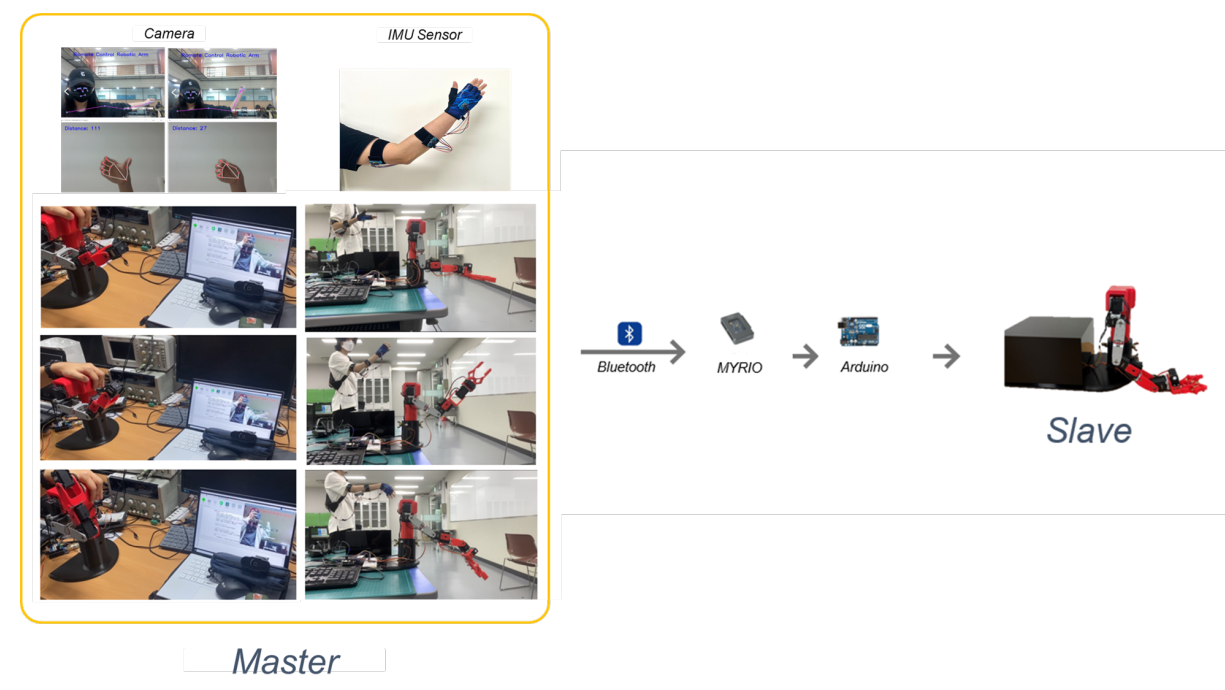 Title: This was an undergraduate graduation project involving a master-slave type teleoperated robotic arm. We developed a robotic arm that replicates the structure of human joints, enabling it to mimic arm movements through remote control using OpenCV technology and an IMU sensor-based controller attached to the arm. By utilizing wireless communication technology, the system allows operation without spatial constraints, and the teleoperation via wireless communication enables the robotic arm to more flexibly imitate human arm movements.
Title: This was an undergraduate graduation project involving a master-slave type teleoperated robotic arm. We developed a robotic arm that replicates the structure of human joints, enabling it to mimic arm movements through remote control using OpenCV technology and an IMU sensor-based controller attached to the arm. By utilizing wireless communication technology, the system allows operation without spatial constraints, and the teleoperation via wireless communication enables the robotic arm to more flexibly imitate human arm movements.