
Undergraduate Research Project(Teleoperation experiments with haptic)
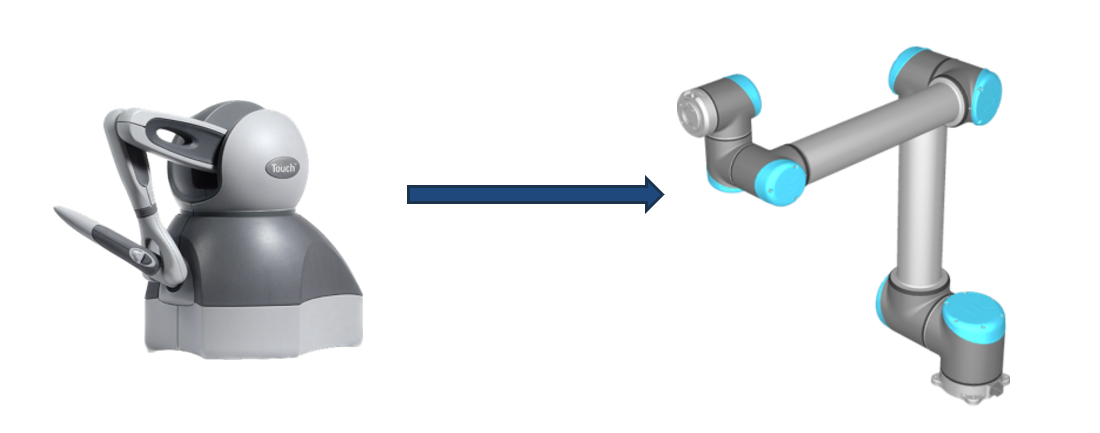 The Phantom Omni is a commercially available, portable haptic device with six degrees of freedom (DoF), developed by Sensable Technologies.
The Phantom Omni is a commercially available, portable haptic device with six degrees of freedom (DoF), developed by Sensable Technologies.
The Universal Robots UR5 is a highly flexible robotic arm commonly used in both industry and academia. It enables safe automation of repetitive or hazardous tasks and also has six degrees of freedom, similar to the Phantom Omni. Using Hooke’s law, a virtual wall was implemented with the Phantom Omni to provide reactive haptic feedback.
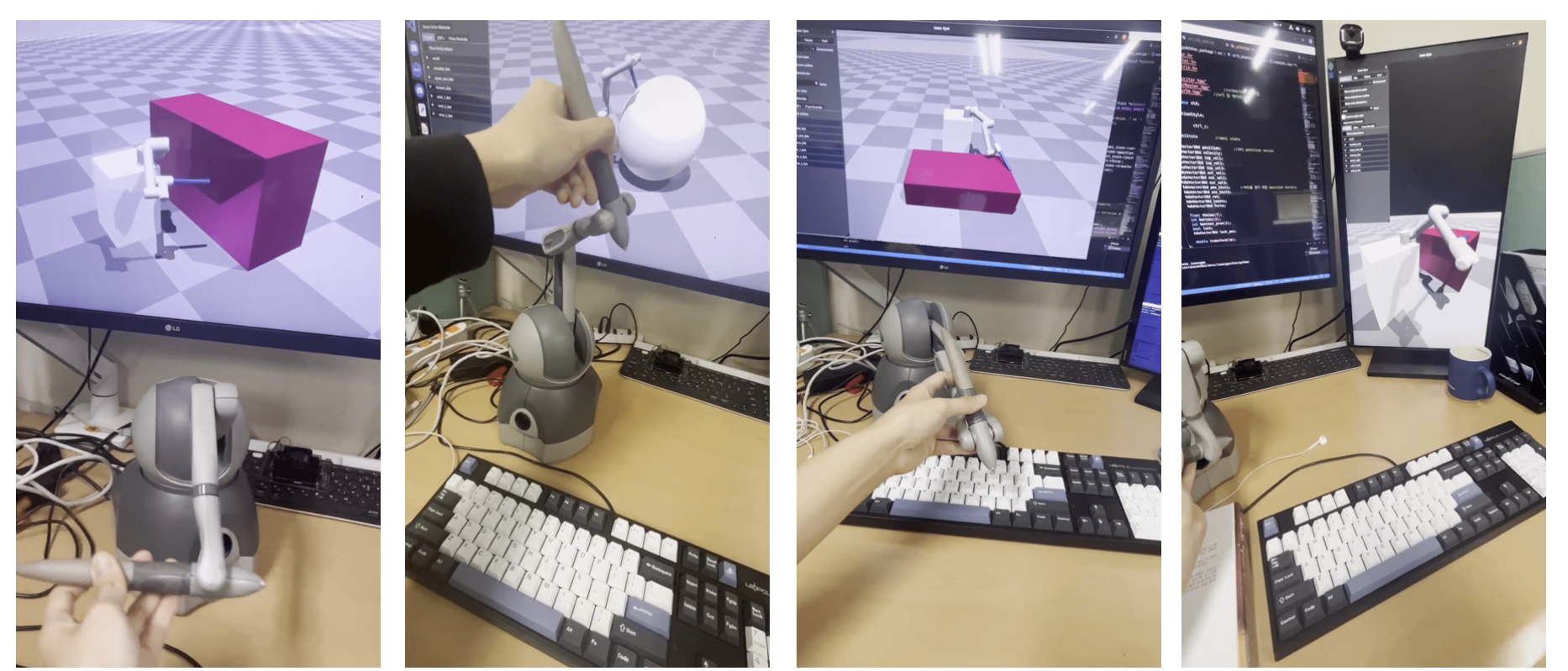
Through ROS2, the Phantom Omni and the UR5 inside Isaac Gym were connected, enabling the simulation of coordinated robot movements and the visualization of virtual environments, including interactive virtual walls.
This setup allowed for intuitive teleoperation experiments and provided insights into force-based control and human-in-the-loop robot interaction.