
Reinforcement Learning with conveyor belt
This project was conducted during the first semester of my master’s program. 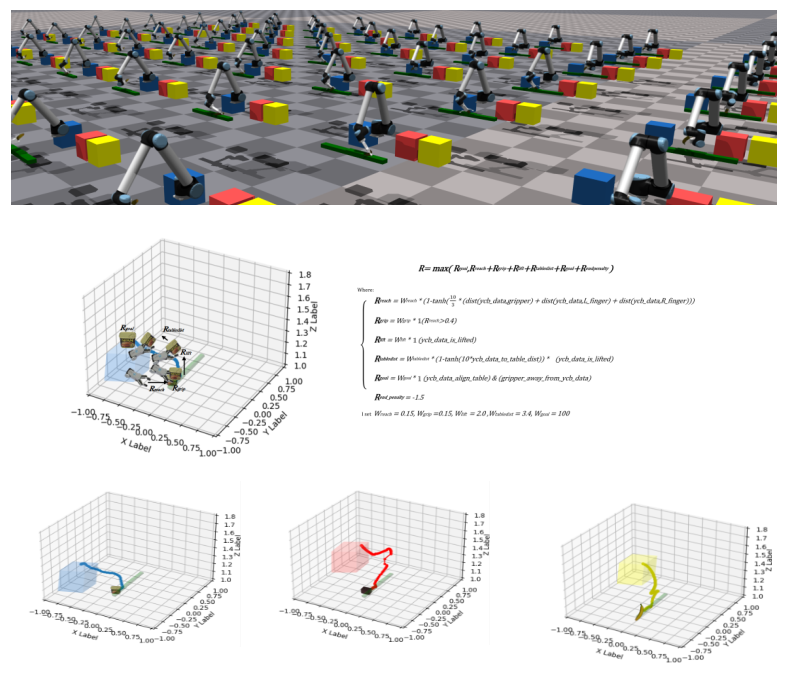
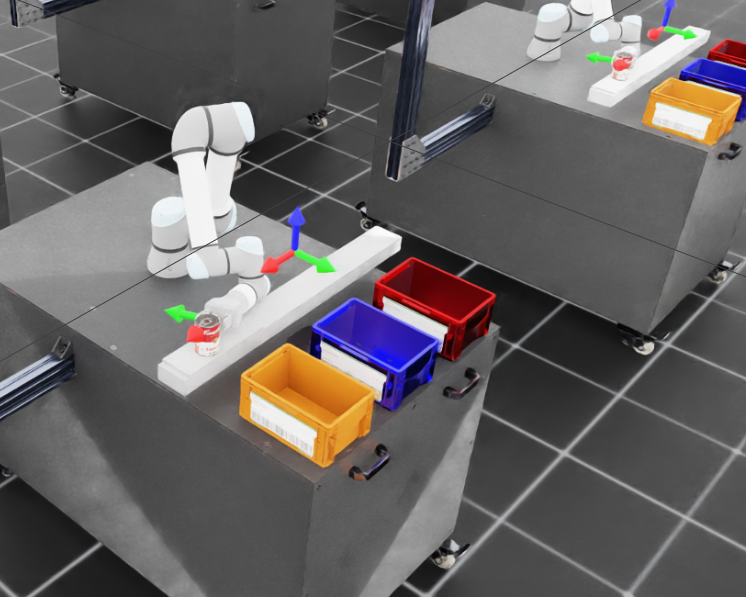 Reinforcement learning was conducted in dynamic environments using Isaac Lab and Isaac Gym, where objects move on a conveyor belt. The task was to pick up YCB objects and place them into boxes of the corresponding color. The algorithm used was PPO, and training was performed with a UR5e robot.
Reinforcement learning was conducted in dynamic environments using Isaac Lab and Isaac Gym, where objects move on a conveyor belt. The task was to pick up YCB objects and place them into boxes of the corresponding color. The algorithm used was PPO, and training was performed with a UR5e robot.